Guidance, Navigation and Control
Overview
- The research in Guidance, Navigation, and Control (GN and C) at San Diego State University aims at developing theory, methods, advanced algorithms, and experimental/physical platforms that can autonomously plan the mission and optimize trajectories, and execute the necessary maneuvers to accomplish the mission objectives of aerospace vehicles.
- The applications include both air and space vehicles.
- The mission envelope encompasses air traffic management, atmospheric flight, launch ascent, on-orbit maneuvering, and planetary entry, powered descent, and landing.
COre Faculty Members
Ahmad Bani Younes
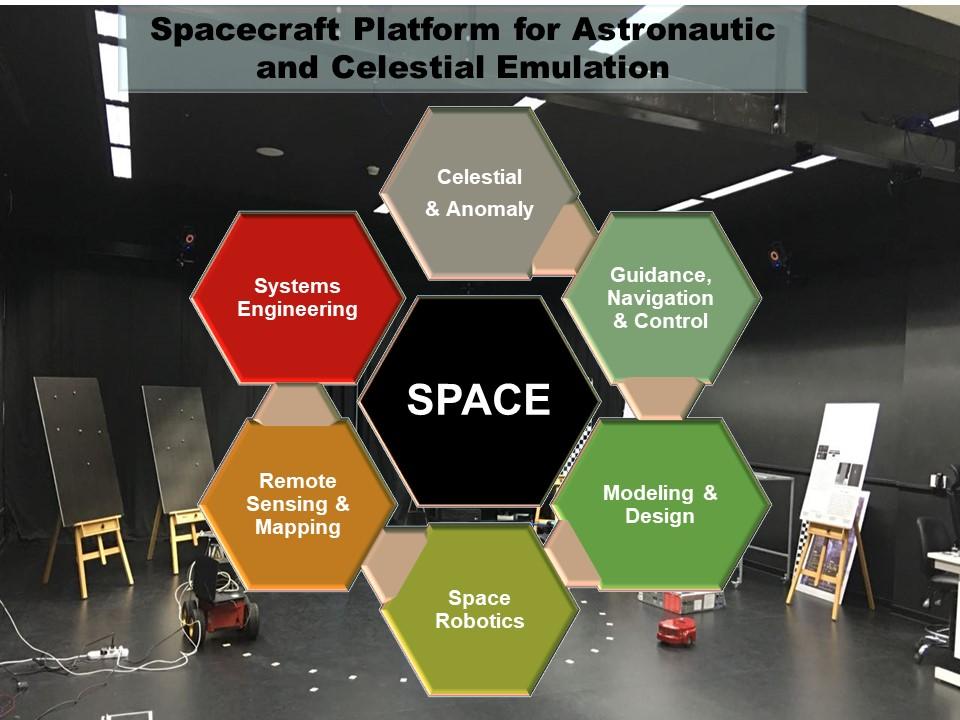
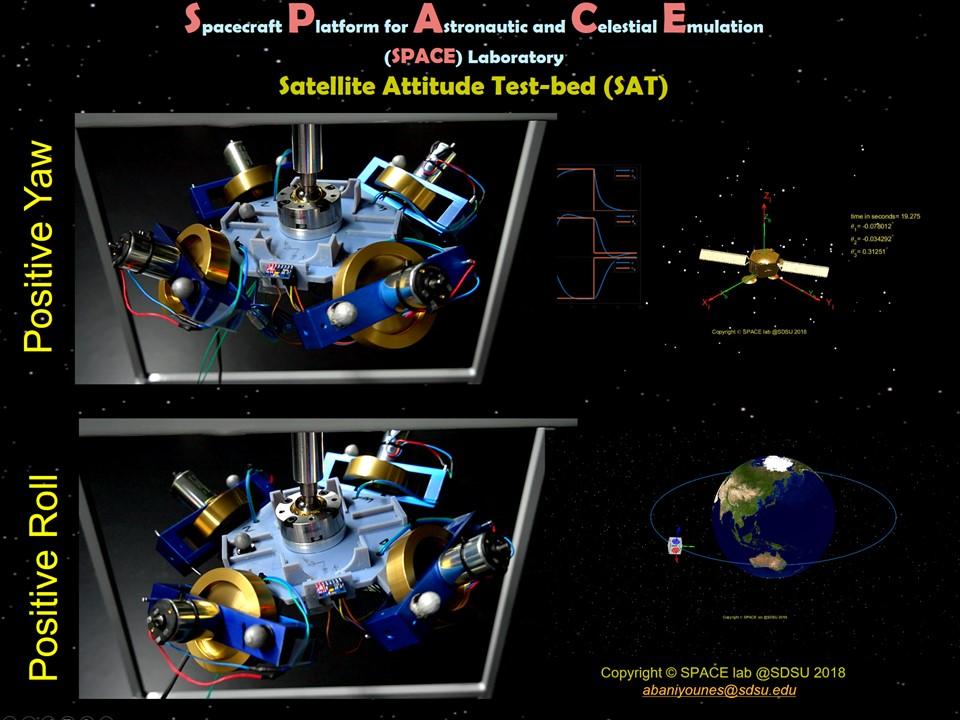
Dr. Bani Younes has been developing a suitable approach to ground-based mobile platform technology that simultaneously permits large general motions and highly precise inertial and relative navigation and control, by building the Spacecraft Platform for Astronautics and Celestial Emulation (SPACE) laboratory. It aims to be a 6DOF facility that supports comprehensive studies and hardware experiments for sensing, guidance, dynamics, & control of space operations in an operationally relevant environment. The lab conducts research in robotic sensing and control with an aim to enhance the fields of proximity operations, human-robot interaction, stereo vision, swarm robotics, and autonomous aerial vehicles. This work combines both theory and experiment, including computational methods in Astrodynamics. Various basic and advanced methods have been explored in computational celestial mechanics for general N-body problems with arbitrary order perturbations in order to produce self-tuning, highly parallelizable and efficient algorithms.
Jun Chen
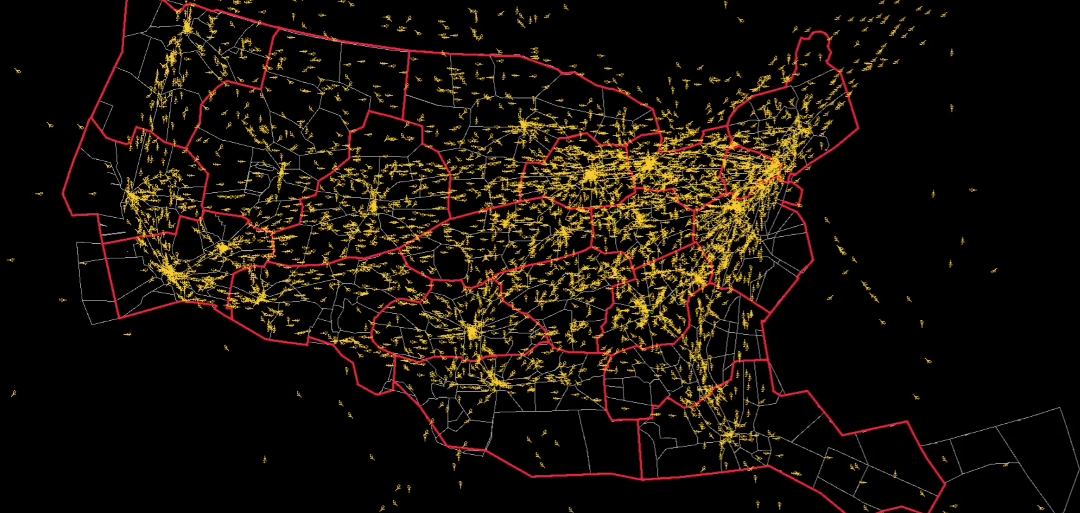
In order to efficiently balance traffic demand and capacity, optimization of Air Traffic Flow Management (ATFM) relies on accurate predictions of future capacity states. However, these predictions are inherently uncertain due to factors, such as weather.
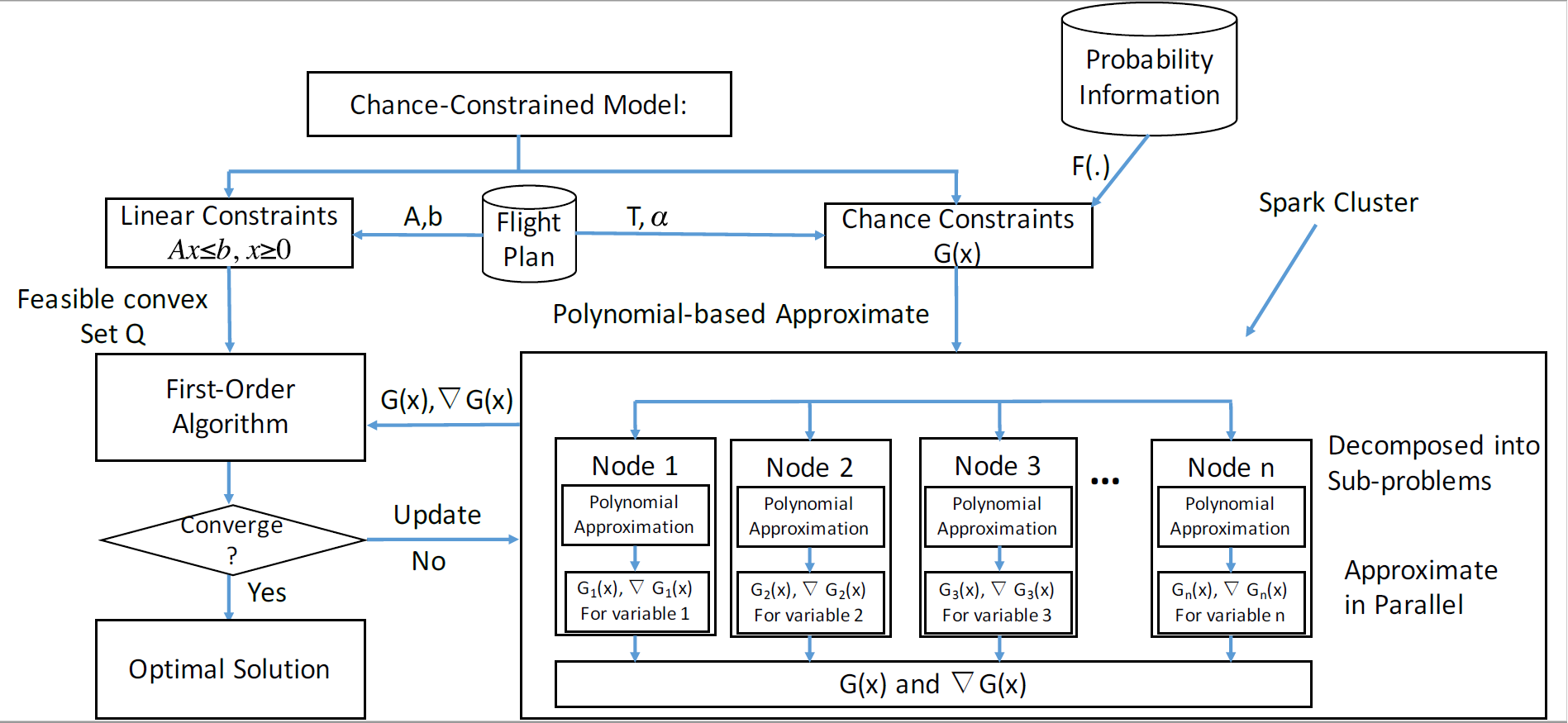
This research work presents a novel computationally efficient algorithm to address uncertainty in ATFM by using a chance-constrained optimization method. First, a chance-constrained model is developed based on a previous deterministic Integer Programming optimization model of ATFM to include probabilistic sector capacity constraints. Then, to efficiently solve such a large-scale chance-constrained optimization problem, a polynomial approximation-based approach is applied. The approximation is based on the numerical properties of the Bernstein polynomial, which is capable of effectively controlling the approximation error for both the function value and gradient. Thus, a first-order algorithm is adopted to obtain a satisfactory solution, which is expected to be optimal. Numerical results are reported in order to evaluate the polynomial approximation-based approach by comparing it with the brute-force method. Moreover, since there are massive independent approximation processes in the polynomial approximation-based approach, a distributed computing framework is designed to carry out the computation for this method. This chance-constrained optimization method and its computation platform are potentially helpful in their application to several other domains in air transportation, such as airport surface operations and airline management under uncertainties.
Ping Lu
A hallmark of Prof. Lu’s research program has been addressing real-world challenges in aerospace engineering with academic rigor. In this pursuit Prof. Lu has worked extensively with NASA, DoD, and the Aerospace Industry. Prof. Lu’s research program covers
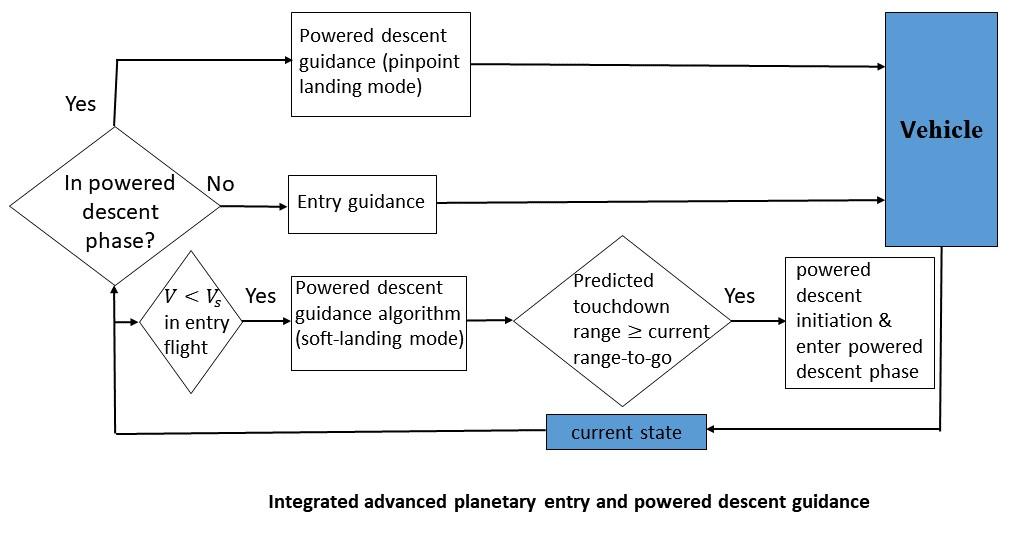
- Advanced guidance of aerospace systems: autonomous aerospace guidance covering launch ascent, hypersonic airbreathing vehicles, spacecraft rendezvous and proximity operations, aerocapture and entry, and planetary powered descent; developing theory, methodology, algorithms, and software for real-time on-board applications
- Autonomous aerospace trajectory/mission optimization and planning: Space, UAS and other autonomous vehicles;
- Optimal and nonlinear control with applications in aerospace systems.
- Hypersonic atmospheric flight mechanics
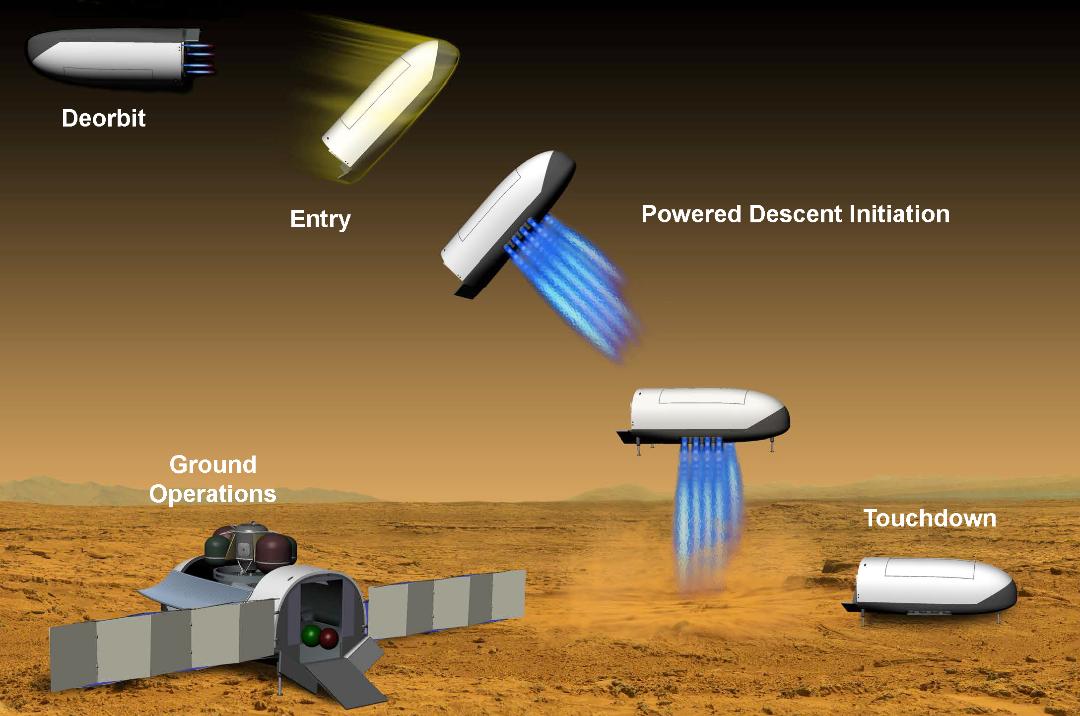
A current focus is optimal aerocapture guidance and integrated entry and powered landing guidance for pin-point entry and landing of future human Mars missions.